
Creazione testa panoramica motorizzata con Arduino
per Virtual Tour

Mi è capitato, nei servizi di realizzazione Virtual Tour, di avere specifiche necessità durante le riprese panoramiche con fotocamere full-frame e diverse ottiche (dal fisheye al 35mm per ottenere immagini equirettangolari anche di dimensioni enormi, per il massimo della qualità).
Il problema principale era quello di ricordare e mantenere la suddivisione in gradi di rotazione per ogni scatto, sia sull’asse X che Y (pan e tilt), specialmente quando i punti panoramici da riprendere sono molti e il tempo poco.
Per fare un esempio, scattando con un 28mm in HDR si otterranno almeno 114 immagini per singolo punto panoramico.
Inoltre mi è capitato di dover fare riprese ad un’altezza superiore ai 2 metri.
Cercando in rete ho trovano ottimi prodotti specifici per le riprese video, con movimenti fluidi, inseguimento soggetto, ecc…, e quasi nulla come vere teste Pano, cioè che permettano di traslare la fotocamera per raggiungere il punto nodale dell’ottica e con rotazioni a step di gradi impostati, (quelle trovate sono poche e costose).
Spinto dalla curiosità e la voglia di costruire qualcosa con le mie mani, ho trovato illuminante il mondo di Arduino.
Arduino è una scheda elettronica con microcontrollore programmabile, open-source – nato come strumento per la prototipazione rapida – viene usato per realizzare progetti di robotica e automazione in genere, facile da programmare e alla portata di tutti.
Quindi mi sono messo a creare la mia testa panoramica motorizzata.
La cosa principale della mia idea era quella di poter comandare la testa a distanza, senza cavi e alimentatori collegati.
La seconda cosa, la possibilità di manovrare la testa sia a step singoli, che totalmente automatizzata, facendogli eseguire in piena autonomia cicli completi di rotazione pan e tilt, con azionamento della fotocamera.
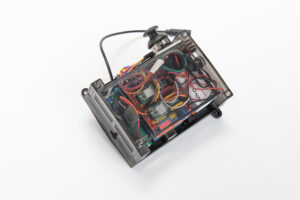
Terza cosa, la semplicità costruttiva, evitando l’uso di cinghie e pulegge ingombranti.
Questo di contro ha reso la scelta dei motori complicata, perché è necessaria una forza tale da mantenere e ruotare un peso di circa 2kg a sbalzo (una forza maggiore a 200 N/cm …) e tanta corrente da fornire con le sole batterie.
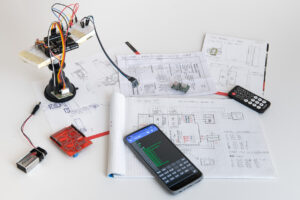
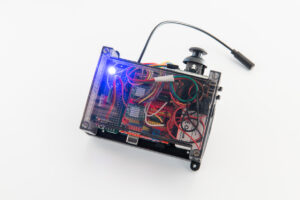
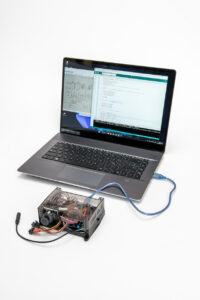
Dopo circa un mese di lavoro, tra ricerca, studio, acquisto di tutto il materiale necessario (anche sbagliando!), saldature, schede bruciate e programmazione, sono arrivato alla realizzazione del mio primo prototipo di testa panoramica motorizzata.
Al momento la testa viene comandata in 3 modi: 1. manualmente tramite joystick, 2. con telecomando IR e 3. con Smartphone tramite bluethoot!
Ho già programmato 6 tipi diversi di automazioni, per ottiche da 11mm a 30mm, e il tutto sembra funzionare molto bene.
Per rendere il progetto ancora più completo sto cercano di integrare una bussola elettronica, utile per far orientare il motore X a Nord per l’inizializzazione delle panoramiche, ma non funziona correttamente e probabilmente a causa del campo magnetico creato dai motori. Cercherò soluzione.
Sono soddisfatto della testa mod. “Frankenstein”.
Ora è tempo di testarla per bene e apportare piccole migliorie.






–
One Comment
Gianluca says:
7 Aprile 2023 at 20:29
Molto soddisfatto di come lavora
